手写VIO第一章优秀答案:第一题是VIO文献阅读进行总结,第二题是四元数和李代数的更新,第三题是求导。
”手写VIO SLAM“ 的搜索结果

视觉SLAM理论与实践进阶-手写VIO-6 1) 证明公式(15) 2) 完成特征点三角化代码 代码如下: // 遍历所有的观测数据,并三角化 Eigen::Vector3d P_est; // 结果保存到这个变量 P_est.setZero(); /* your code begin ...
本系列主要根据深蓝学院《视觉SLAM进阶:从零开始手写VIO》。博客主要以本人在课程学习过程中的作业和修改的代码为主。如需详细视频及PPT,请联系深蓝学院相关人员。 代码已上传github: ...

vio 视觉前端 视觉前端
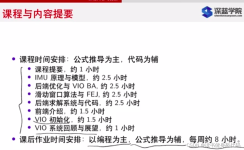
课程大纲 第1章:概述与课程介绍 第1节: 概述与课程介绍 ...第1节: 滑动窗口算法理论:VIO融合及其可观性与一致性 第2节: 滑动窗口算法实践:逐行手写求解器 第4章:视觉前端 第1节: 视觉前端 第5章: VINS系...


视觉SLAM理论与实践进阶-手写VIO-概述-附代码链接一、VIO文献综述二、四元数和李代数更新三、 导数公式的推导 一、VIO文献综述 1.1 视觉与IMU进行融合之后有何优势? 答: 1). 纯视觉 SLAM 容易受图像遮挡,光照...




贺一家、高翔、崔华坤老师在深蓝学院开设了vSLAM进阶课程《从零开始手写VIO》,课程相当火爆,已经有数篇关于第一章作业的优秀博文。不过小编觉得还可以从两个方面进一步优化这个主题的博文。首先,第二道编程题和第...



完成单目 Bundle Adjustment (BA) 求解器 problem.cc 中的部分代码1.1完成 Problem::MakeHessian() 中信息矩阵 H 的计算1.2完成 Problem::SolveLinearSystem() 中 SLAM 问题的求解1.2.1理论及代码1.2.2仿真结果及...

目录1 安装im_utils1.1 安装1.2 可能出现的Error1.3 运行1.4 参考资料2 编译vio_data_simulation-master3 编译vio_data_simulation-ros_version3.1 编译3.2 生成imu.bag3.3 使用imu_utils标定IMU的白噪声和零偏不...
文章目录前言·与同主题博文的不同1.设置 IMU 仿真代码中的不同的参数,生成 Allen 方差标定曲线1.1环境搭建 前言·与同主题博文的不同 延续该系列第一篇博文的风格,本博文站在之前同主题优秀博文的肩膀上的同时,...

从零开始手写vio- 第5节滑动窗口第5节滑动窗口算法实践

文章目录前言·与同主题博文的不同1.证明式(15)1.1对公式(15)的说明1.2推导过程2.请依据本节课公式,完成特征点三角化代码,并通过仿真测试2.1理论依据2.2代码及仿真结果3.请对测量值加上不同噪声(增大测量噪声...

【从零开始手写 VIO】习题
标签: slam
1. VIO 文献阅读 视觉与IMU进行融合之后有何优势? 答:视觉提供丰富的场景信息,可以用来建立3D模型,定位和重定位;IMU提供自我运动的信息,可以用来恢复尺度信息,估计重力方向和速度信息等。 有哪些常见的视觉 +...

推荐文章
- 手写一个SpringMVC框架(有助于理解springMVC) 侵立删_springmvc可以用来写安卓后端吗-程序员宅基地
- 线性判别分析LDA((公式推导+举例应用))_lda推导-程序员宅基地
- C# 结构体(Struct)精讲_c# struct-程序员宅基地
- 支付宝Wap支付你了解多少?_阿里wap支付-程序员宅基地
- Java计算器编写,实现循环输入_java简易计算器可使用户多次输入-程序员宅基地
- 【多维Dij+DP】牛客小白月赛75 D-程序员宅基地
- Android之内存优化与OOM-程序员宅基地
- Azure Machine Learning - 视频AI技术_azure ai 視頻索引器-程序员宅基地
- 个人知识管理软件使用感受-程序员宅基地
- WWDC2019 ------深入理解App启动_wwdc app启动-程序员宅基地